

AK Embedded Base Kit - STM32L151 - Event Driven: Task & Signal
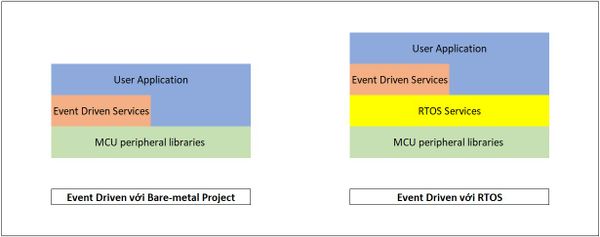
Tại sao Event Driven cần thiết cho hệ thống nhúng ?
Các khái niệm của hệ thống Event Driven
- Event Driven nôn na là một hệ thống gửi thư (gửi message) để thực thi các công việc. Trong đó, Task đóng vai trò là người nhận thư, Signal đại diện cho nội dung công việc. Task & Signal nền tảng của một hệ Event Driven.
- Thông thường mỗi Task sẽ nhận một nhóm công công việc nào nào đó, ví dụ: quản lý state-machine, quản lý hiển thị của màn hình, quản lý việc cập nhật phần mềm, quản lý hệ thống watchdog ...
- Message được chia làm 2 loại chính, Message chỉ chứa Signal, hoặc vừa chứa Signal và Data. Message tương đương với Signal.
- Chỗ thực thi một công việc nào đó thì mình gọi là Handler.
Các services của hệ thống Event Driven
- Sử dụng 1 biến để lưu State, mỗi State tương ứng với 1 giá trị của biến.
- Sử dụng 1 con trỏ hàm để lưu State, mỗi hàm là mỗi State.
- Sử dụng 1 table để làm State, mỗi table là mỗi State, việc thay đổi các State theo Signal sẽ được biểu diễn ở dạng bảng (Table), Developer rất dễ trace sự chuyển đổi State với dạng Table. Với hệ thống nhiều State và Signal, mình ưu tiên sử dụng loại này.
Một số ưu điểm khi apply Event Driven
- Thiết kế phần mềm tổng thể bằng UML, Sequence Diagram.
- Dễ dàng phân chia nhỏ khối lượng công việc phát triển phần mềm nhúng.
- Khả năng cách ly cao, chúng ta có thể viết thêm tính năng mới trên một source cũ với khối lượng code lớn rất dễ dàng, ít ảnh hưởng đến đến source cũ.
- Dễ dàng phát triển trên ứng dụng kết hợp nhiều CPU với các nền tảng khác nhau (ví dụ: Kết hợp giữa MCU với MPU (Linux).
- Dễ dàng Debug cả khi đang phát triển sản phẩm lẫn khi sản phẩm chạy thực tế.
- Dễ dàng lên các hệ thống auto test phần mềm.
- Tiết kiệm bộ nhớ của chương trình.
Hướng dẫn tạo Task và bắn message đến Task
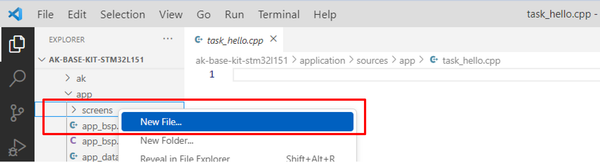
(1. New File)
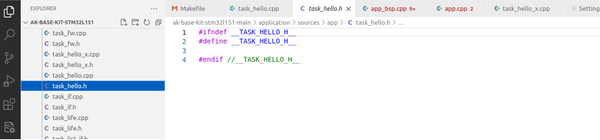
(2. task_hello.h)
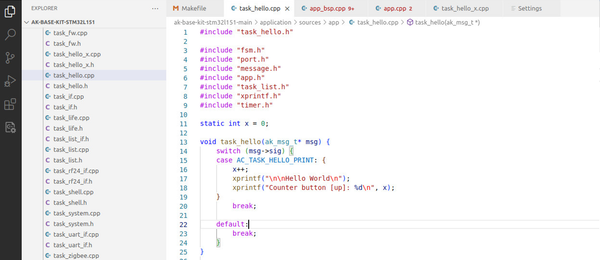
(3. task_hello.cpp)
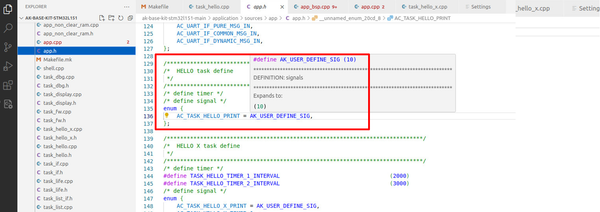
(4. Khai báo signal AC_TASK_HELLO_PRINT)
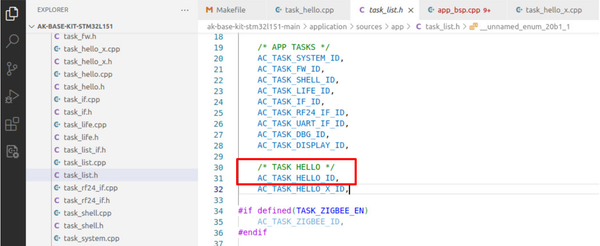
(5. Khai báo task_id trong file task_list.h, đặt tên là: AC_TASK_HELLO_ID)
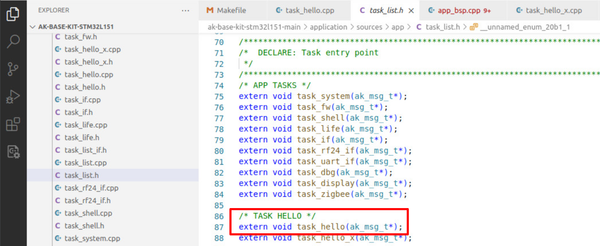
(6. Khai báo handler task_hello trong task_list.h)
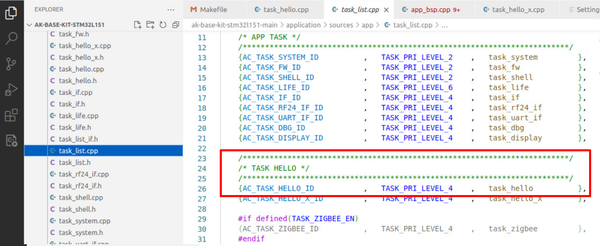
(7. Khai báo “task_hello” vào task_list.cpp)
Bước 4: Thêm task_hello.cpp vào app/Makefile.mk để build source
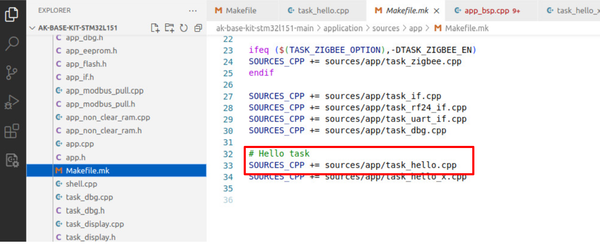
(8. Thêm task_hello.cpp vào Makefile.mk để build source)
Bước 5: Bắn message đến task_hello
Nhấn nút Button [Up] trên kit để bắn message đến task_hello, code trong file app_bsp.cpp
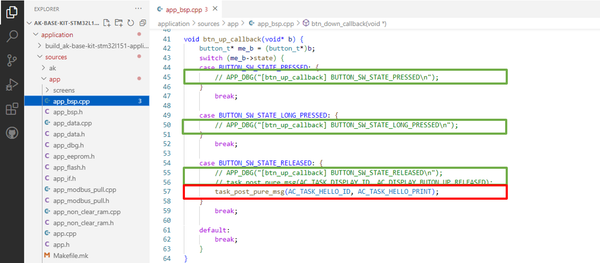
(9. Tạo trigger bắn message đến task_hello)
AK hỗ trợ 3 loại hàm để bắn message đến Task, vai trò của từng hàm như sau:
- task_post_pure_msg: Dùng để gửi Pure Message, Pure Message là loại messge chỉ mang theo Signal, không chứa data.
- task_post_common_msg: Dùng để gửi Common Message, Common Message là loại messge có chứa thêm data, và kích thước data nó mang theo tối đa là 64 Bytes. Đây là loại message dùng nhiều nhất trong hệ thống.
- task_post_dynamic_msg: Dùng để gửi Dynamic Message, Dynamic Message là loại message có chứa thêm data, kích thước của nó mang theo giới hạn bởi bộ nhớ heap.
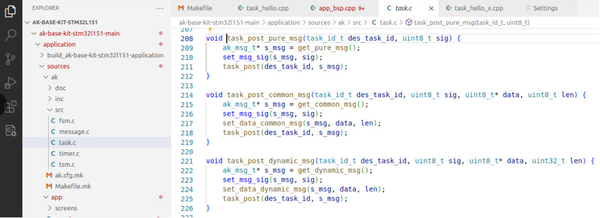
(10. Các loại message được sử dụng trong AK)
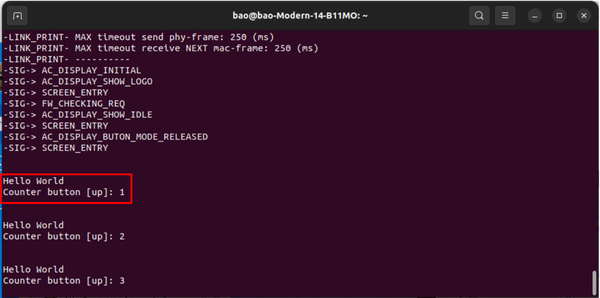
(11. kết quả hiển thị trên minicom)
Bài tập 2: kịch bản yêu cầu như sau:
- Tạo thêm một Task mới đặt tên là “task_hello_x”, mỗi lần nhấn nút [Up] sẽ bắn một message đến “task_hello” như bài tập 1.
- Sau đó từ “task_hello” sẽ bắn một Common Message mang theo giá trị của biến x đến “task_hello_x”, biến x sẽ tăng dần.
- Từ “task_hello_x” đọc nội dung message và xuất ra data đã nhận được.
Lưu ý: Chúng ta sẽ tạo thêm "task_hello_x" như hướng dẫn ở Bài tập 1 nhé !
Bước 1: Gửi và nhận giá trị biến x từ "task_hello" đến "task_hello_x".
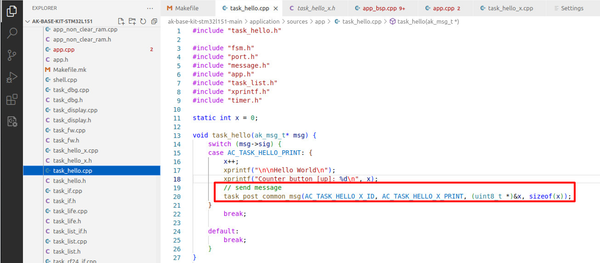
(12. Gửi message từ “task_hello” sang “task_hello_x”)
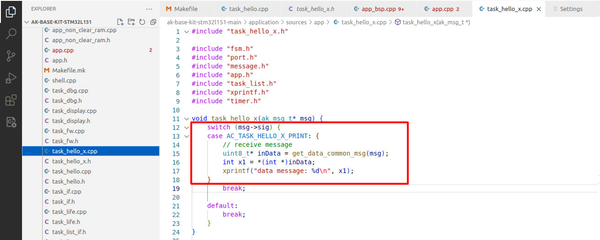
(13. Xử lý nhận Common Message tại “task_hello_x”)
Bước 2: Test thành quả qua minicom thôi !
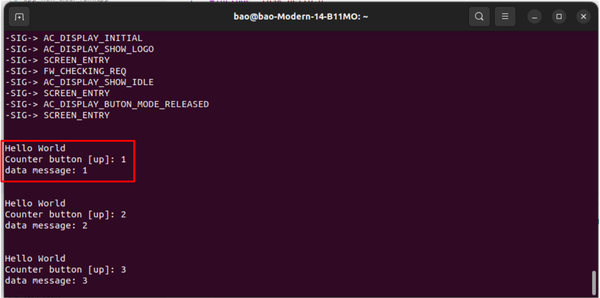
(14. Kết quả hiện thị đúng như kịch bản yêu cầu)
Như vậy qua 2 bài tập trên các bạn đã làm quen được với tạo Task và Signal, đồng thời biết được cách gửi nhận message giữa các Task với nhau.
Nếu trong quá trình thao tác có phát sinh các lỗi hoặc các thắc mắc, các bạn thông tin về EPCB theo các kênh sau nhé !
- Facebook: https://www.facebook.com/groups/laptrinhvidieukhiennangcao
- Zalo: 0367 939 867
- Email: contact@epcb.vn
Bình luận